Les chercheurs de l’Institut Max Planck pour les systèmes intelligents à Stuttgart ont réalisé une avancée remarquable en s’inspirant des pangolins pour concevoir un robot flexible et polyvalent. Ce robot, doté de caractéristiques uniques, pourrait révolutionner le domaine de la robotique médicale et ouvrir de nouvelles perspectives pour les interventions médicales non invasives.
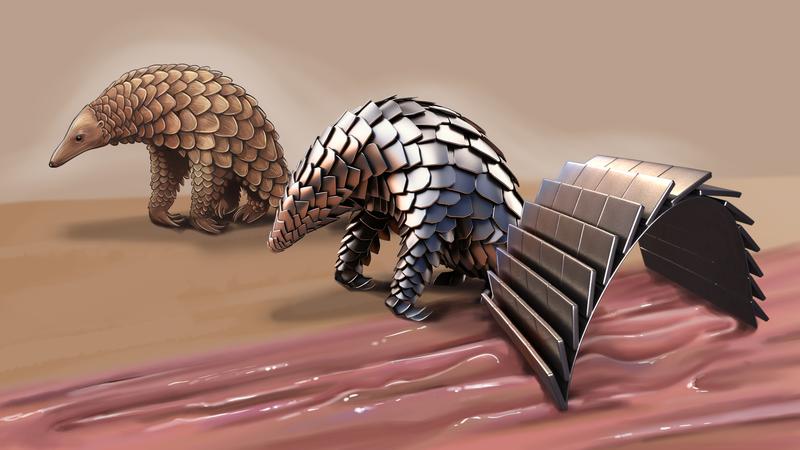
Les pangolins sont les seuls mammifères entièrement recouverts de plaques d’écailles rigides. Les chercheurs ont été fascinés par la capacité de ces créatures à se rouler en boule rapidement pour se protéger. S’inspirant de ce mécanisme, ils ont créé un robot flexible capable de se replier sur lui-même. Ce robot novateur est composé de deux couches distinctes : une couche externe souple en polymère contenant de petites particules magnétiques, et une couche interne rigide constituée d’éléments métalliques superposés. Lorsque le robot est exposé à un champ magnétique à basse fréquence, les particules magnétiques s’activent et lui permettent de se plier et de se rouler en boule sans endommager les tissus environnants.
Une fois en position sphérique, le robot est capable de transporter des particules, telles que des médicaments, à l’intérieur de sa structure. Cette fonctionnalité offre des perspectives intéressantes pour l’administration ciblée de traitements médicaux, en permettant au robot de transporter des substances et les délivrer spécifiquement là où elles sont nécessaires.
De plus, le robot présente une autre caractéristique révolutionnaire : il peut générer de la chaleur. En effet, lorsqu’il est soumis à un champ magnétique à haute fréquence, les éléments métalliques intégrés au robot produisent de la chaleur, atteignant une température pouvant être supérieure à 70°C. Cette propriété thermique est particulièrement intéressante pour des procédures médicales telles que l’arrêt d’un saignement ou l’ablation de tumeurs.
Les chercheurs ont déjà démontré avec succès la flexibilité et le contrôle précis de ce robot à travers des tissus animaux et des organes artificiels. Ils envisagent maintenant de développer davantage cette innovation en l’intégrant dans des applications médicales concrètes.
Source : https://idw-online.de/de/news816230
Publication originale :
Le numéro DOI de cette publication sera 10.1038/s41467-023-38689-x.
https://www.nature.com/articles/s41467-023-38689-x
Image : Copyrigth : MPI for Intelligent Systems